01 · The challenge
The Limitations of Traditional Computer Numerical Control (CNC) Milling Systems
Traditional Computer Numerical Control (CNC) milling systems face key limitations:
- Static work envelopes and tool rigidity constrain large or complex parts
- Customization for non-standard geometries increases costs
- Composites, soft metals, and foams cause long setups and fragmented workflows
- Manual intervention and limited flexibility reduce efficiency
As a result, manufacturers face higher costs, lower productivity, and limited adaptability to diverse materials and geometries.
02 · The Solution
Six-Axis Robotic Milling for Complex, Oversized Parts
Know-How: advanced mathematical and physical models implemented as software.
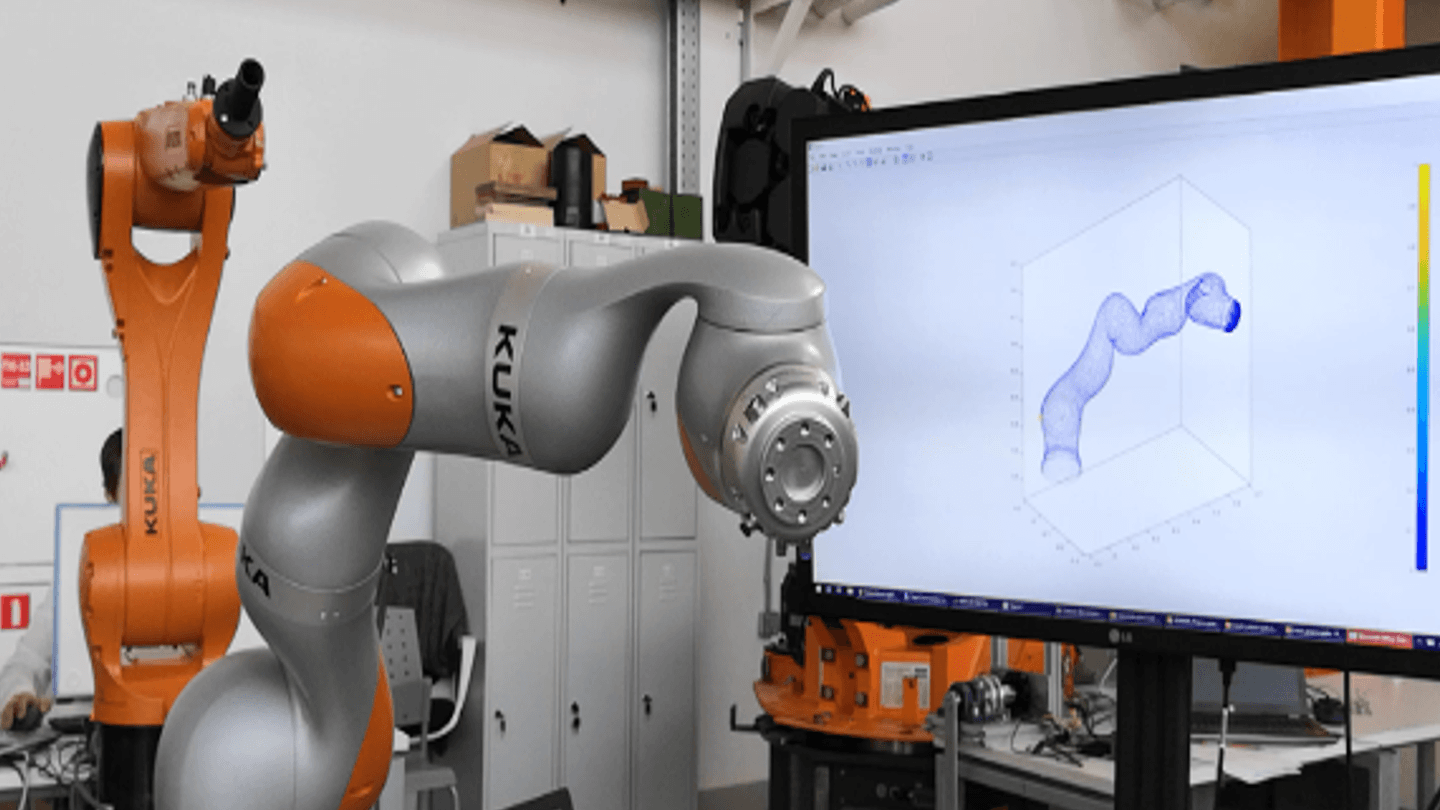
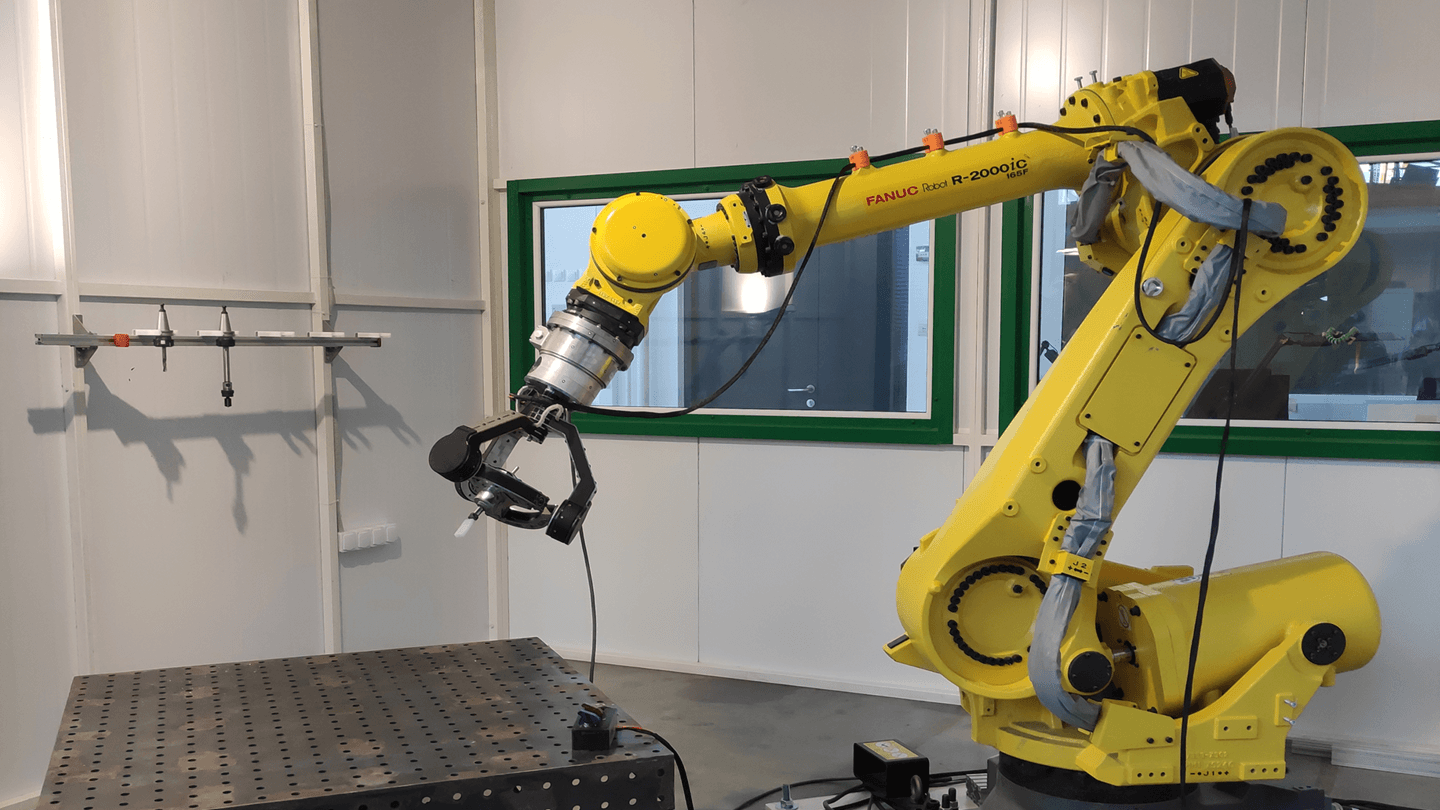
- Robotic Tool Kit (RTK) prototype for robotic milling, enabling full six-degree-of-freedom (6-DoF) machining of complex and oversized parts in a single setup
- Industrial-arm integration, compatible with high-precision electrospindles and automatic tool changers
- Multi-axis motion control with continuous tool-orientation management for freeform surface machining
- Flexible architecture for deployment within existing production cells and CNC-centric workflows
Impact
Replaced hardware setup with a software-only solution.
- Reduction of production time by 20-80%, depending on process and material
- Increase in machining precision by 2.4× to 10× through calibration-driven accuracy
- Capability to process custom and oversized parts with consistent quality
- Boost in overall manufacturing productivity by 15-20%
03 · Industrial Directions
Enabling Precision and Flexibility Across Manufacturing Sectors
- Applicable in domains where economical efficiency, high precision and productivity are critical, including advanced manufacturing, robotic machining, and high-mix/low-volume production.
- Industries include aerospace prototyping, furniture and interior component milling, custom fabrication, light machinery, and other sectors requiring adaptable, automated precision milling of medium- to large-format parts across a wide range of materials.
- Aerospace, Automotive, Industrial Automation, Manufacturing & Engineering, Precision Engineering, Robotics, Tooling Industry